what is the voice operated vehicle?
what is the voice operated vehicle? As the mankind has evolved, it has found ways to improve lifestyle by updating their standards of living by modifying the way they live, talk, communicate, travel, eat. In short, man has made remarkable progress in making his life more feasible, lavish and adaptable by inventing devices and gadgets which assists them in their daily life. As man has invented gadgets to assist him in every aspect of life, it has made noticeable efforts in his means of transportation. Travelling has been made so easy, effective, luxurious and time saving.
People of old times deployed animals like camels, horses or elephants to carry them around. Then man invented wheel which revolutionized the means of transportation and ended the human dependency on animals to carry him around. Vehicles were made. The concept of independent means of transportation came into the world. Years later, almost every man has his own independent means in terms of car, bike or bicycle which he can drive by himself and go to some long distances in a very fleeting time.
However, the physically challenged people comprising a notable section of the society has largely been neglected in this development. For the physically impaired people, not a lot of progress or development has been made in their own independent means of transportation.
Application of voice operated vehicle
Information was collected from patients in a survey regarding the impact and effectiveness of the new electric wheelchairs. Results depicted that 9 to 10 % of patients using powered electric wheelchair having received appropriate training “find it extremely difficult or impossible to use the wheelchair for activities of daily living”. Various explanations were put forward with few of them including the governing of wheelchair with a joystick, scratchy and inappropriate user interface for the challenged individual (since persons having serious motion deficiencies find it rigorous to run and control the joystick functions effortlessly and easily)
Avoiding hurdles on its own should be a capability of every motorized wheelchair as it moves at a decent speed. This task must be attained at a reduced expense which is affordable for both physically impaired persons and organizations who provide them financial assistance. Keeping this particular problem in notice, we are putting forward the idea of a voice operated wheel chair which has the capability of detecting and avoiding the hurdles automatically.
As smart phones today have become important entity for everyone and in this smart phone era every product with smart phone application is widely received by the public. Hence designing a smart phone controlled wheelchair would prove significant. Conventionally, wirelessly controlled products incorporate RF circuits. These products had restrictions like little frequency ranges, restricted controls and a mediocre range. But android operated wheel chair can go past these restrictions. It possesses range equals to a service provider’s coverage area, and more bandwidth as compared to wireless control robots which utilizes RF circuits and there is no fear of interfering with other controllers.
Wheelchair which can be controlled through voice is significant to physically disable people specially those who are paralyzed not only by foot but by hands too. Anoop.K. J1 et al. worked on his paper Designing and Modelling of Voice Controlled Wheel Chair Incorporated with Home Automation. Using PIC Microcontroller and HM2007 (voice recognition kit), he designed seven different commands for basic motion of the wheelchair and control of home appliances. Commands included moving “forward” and “backward”, turning “left” and “right”, “stop” and light on and off. Hence wheelchair’s direction using the above-mentioned voice commands given by the user could be controlled. Also, without moving user could control home appliances.
In 1993, Bourhis G., offers an autonomous navigation and semi-autonomous navigation which is based on internal maps in which the “Vehicle Autonome pour Handicap Moteur” (VAHM) incorporated the feature of obstacle avoidance by wall following and obstacle avoidance. In navigation, sonars and infrared radiations are used in project designing to avoid hurdles and obstacles and calculate the current position of an individual by using previous estimated output through dead reckoning process.
In 2012, Ruzaij M.F., et al, designed a wheel chair with obstacle detection capability by making use of an ultrasound system which assists the challenged person to be able to apply brake a temporary manual stoppage in case of any hurdle. The design provided protection from accidents which occur due to collision crash if is there by chance a mistake in voice command.
In 2013, Kumaran M.B., et al, design and fabricated a module for recognizing voice which recognizes separate isolated words. Input will be taken from the speech recognizing module by a PIC Microcontroller and an ultrasonic sensor was also installed for hurdle detection in its path. As signals were inputted, through module, PIC waited for satisfaction of its path by receiving information from sensor about any hurdles and then a response was generated for command.
Qadri, M.T. put forward a unique method. The theme was designed for the paralyzed individuals by means of a wheelchair with voice based operated. Additionally, it generated distinct desired analogue signals were the words spoken and then were first amplified and then transformed into digital signals. These digital signals were then utilized for driving the wheels by powering up motors.
The paper of International Journal of Engineering Research and Advanced Technology (IJERAT), explains that input signal is transferred to IC HM2007. The main working of IC HM2007 is based on voice recognition purpose. Output signal is generated by the HM2007 which depends on the input signal received from user interface and that signal is then transferred to microcontroller for movement control of fully motorized wheelchair. Two DC motors are employed to control the motion.
R. JAMUNA at El concluded in journal the voice recognition system has 67% of accuracy. When applied in real usage environment some issues highlighted with limited performance. Window mobile pocket is used for PC operating system. Because of this it is costly, so voice IC (HM-2007) for recognition purpose and PIC control to process the system is used. This may reduce the cost and easy to use and high performance for usage purposes.
Mazo, M., Rodriguez, F., Lazaro at El -specified the importance of the sensor for avoiding the obstacle in the path of wheelchair in the paper “Wheel chair for physically disabled people with voice, ultrasonic and infrared sensor control”, (1995). Proposed environment for the wheelchair was floors and ground where distinct types of static and mobile obstacles and the presence of stairs might be encountered. For keeping the initial model cost effective, it will be made for homogenous floors. The device can be improved and made more efficient by incorporating sensor to avoid hurdles and other safety systems.
In 2016 Pramila Kupkar, Prajakta Pandit, Nikita Dhamdhere3 & P.P. Jadhav proposed and designed a project in which Android application is connected to the controller via Bluetooth. For the connection. Of application with the controller the HC-06 module is used inside Microcontroller. To avoid accidents happens due to any obstacle IR sensors are used. they developed the application with two features either Voice or Touch mode. Commands given by the user through android application will be forwarded to the controller through wireless transmission. They have used external batteries as power supply which helps to accommodate large distance.
Krishna Pal Tiwari, Mr. Kranti Kumar Dewangan presented a project of the voice operated wheelchair. They designed the voice-based wheelchair and for that they developed a software that will be controlled by controller and GSM smart phones. After that they were trying to put a biometric feature in it to make it a bit secure. Efforts have been made to develop robotic wheelchairs that work in the same way to an autonomous robot. In other smart wheelchairs sensors are used to avoid accidents, these methodologies do not usually demand prior or previous knowledge of an area for the purpose of avoiding obstacles.
A voice- controlled wheelchair operates through voice commands such right, left, back, forward, start stop etc. They presented that wheelchair can be move by some angle to achieve this they used servo or stepper motors because of their high torques and less RPM. User will be able to rotate the wheelchair by like 30˚,45˚, 60˚ etc. Moving the wheel chair at any angle is new from the other prototypes and it is very helpful for driving the wheelchair left and right along with some angle variations.
A recent concerted initiative between technicians, clinicians and researchers from the fields of engineering, rehabilitation and computer science has launched a prototype intelligent power wheelchair (IPW). They provide IPW with autonomous navigation functions, brings together simulated and robotic intelligence technologies.
The proposed IPW can be controlled by a variety of interfaces (speech recognition, joystick, tactile display), determine and follow a planned path, avoid stationary and vigorous obstacles, pass through doorways and in between stumbling blocks. During the procedure, potential IPW users’ sagacity were imposed in order to ensure that the IPW engage to users’ need. [20] In a review of studies, Simpson revealed that such kind of technologies could benefit people with sensuous or discernment limitations, which allow them to carry out their day-to-day activities.
S. Rao and R. Kuc from Yale University has conducted and presented a similar research on wheelchair, they design and fabricated a prototype of smart wheelchair having a Motorola 68HC11 and ultrasonic sensors. The prototype intended to facilitate individuals who are not only confined to wheelchairs but are also visually impaired by automatically detecting hurdles and fall offs.
Microsoft SDK 5.1 is a software development kit equipped with abilities to drive the wheel chair. Further research and work is also being done on the software. This SDK provided Speech Recognition engines for the interpretation of the voice instructions. The team incorporated these engines in their project. The control algorithms for smooth movement are an incremental system on the specific voice commands the current state of velocity parameters will be updated. a fluid and flexible control motion can be created by a small number of commands, whereas a brief training period will be sufficient and operators’ easily control is also maintained.
Once voice signal is given as input, voice acquisition and recognition are carried out by the MATLAB code. At the time when the controller gets initiated, IR sensor also gets adjusted. The hurdle detection process will be commenced by when IR sensors gets initialized and will immediately inform the controller about the obstacle distance from the position.
what is Steel Manual Wheelchair?
Wheelchair are introduced to help a physically disabled person in their routinely exercise. This wheelchair is perfect for those who are more care dependent. The strong but intensely light weight structure makes it easy to move.
Wheelchair has been around for hundreds of years, but primary wheelchairs were knowing only to help a physically disabled person move from one point to another. With the evolution of time, the disabled individuals get more integrated and the role of wheelchair starts to change as well. Now-a-days wheelchairs are not only supposed a mean of conveyance but it also expresses the individuality of the user. Wheelchair users can find customize high quality, light weight wheelchairs with high-performance full of accessories that can allow them to show individuality.
Now they may have particular accommodation adaptions, individualized regulations, or may be defined to specific activities like sports wheelchairs and standing wheelchairs. There is an acceptable difference between the powered wheelchair, where the power is being provided by batteries and DC motors, and manually operated wheelchairs, where the force is being supplied either by the user or occupant driving the wheel-chair by hand (“self-propelled”), or by an attendant driving from the backside (“attendant propelled”).
what is DC Gear Motor?
A DC gear motor is similar to a regular DC motor but on its output shaft, a gear box in mounted. In other words, you can explain it as a DC motor having a gear head mounted on a rotatory shaft in order to control speed and generate required torque. [28]. The motor’s speed is measured as to how many rotations its shaft takes in one minute. This is termed as “RPM” (revolution per minute) of the motor. The attached gear mechanism assists in speed reduction and torque improvement.
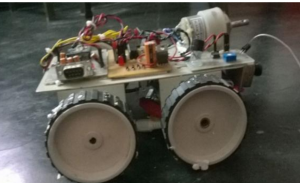
We have used two 12V gear motors. The sprockets and chains are used to attach the motor with the rear wheels and is supported by a metallic frame in order to transfer the movement to the packed wheels.

Also read here
https://eevibes.com/electronics/what-is-the-diode-ideal-and-practical-model/