What is meant by segmentation of image?
What is meant by segmentation of image? This article discusses the first stage of our system; image segmentation. Generally, the RGB images obtained from a digital camera are not simple to work with straightforwardly because the cluttered environment. We need to identify and separate our region of interest, i.e., the road sign .Traffic signs have specified shapes and colors so one can use either color based or shape based methods to discover the sign in the outdoor scene . Color based techniques exploit the fact that road sign have distinctive and contrasting colors, which can be easily distinguished from its surroundings. Apart from color, shape is another attribute of road signs and many researchers look for a characteristic shape, ignoring the color. They argue that as colors vary with illumination and lightening, shape detection is a much better method for identifying road signs. As road signs have well defined shapes that are remains same for diverse conditions. However an occluded sign will be difficult to detect using shape based schemes. But the techniques are mostly used in conjunction with one another as shape detectors always take color information in the next step. Also color based approach will look for some particular shape after taking color into account.
We employ color based technique in this work, followed by shape based detection because looking for a particular color in an image is a clear-cut approach; also it is computationally simpler to run for real time processing. Red-bordered sign(s) are extracted from a real world scene by applying a truncated Gaussian function to hue component of HSI color space so that the red colored pixels in the resultant grayscale image take on higher gray values than the rest. This is followed by a geodesic dilation based hole filling operation and thresholding to a binary image using the well known Nobuyuki Otsu algorithm to finally segment out red rimmed signs even in difficult real world situations.
Hue, Saturation, Intensity (HSI) Color Space:
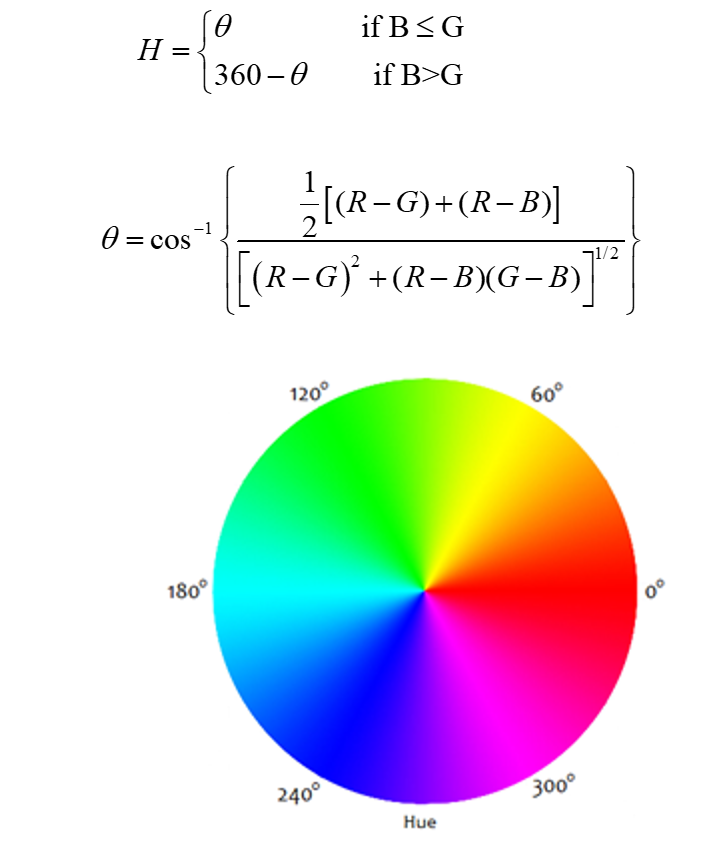
To apply color based segmentation researchers prefer to convert them into a suitable color space. So the RGB image is converted to HSI color space because RGB color space is very sensitive to illumination so it is not preferred by researchers when using color based techniques. Therefore, we prefer HSI space as its hue channel is invariant to shadow or bright light. Since hue component is less sensitive to non- uniform illumination and weather effects, the input image is first converted from RGB to HSI color space using following equations. The hue component of HSI color space carries color information described by an angle between 0 and 360 degrees as shown below
Truncated Gaussian Transformation Function:
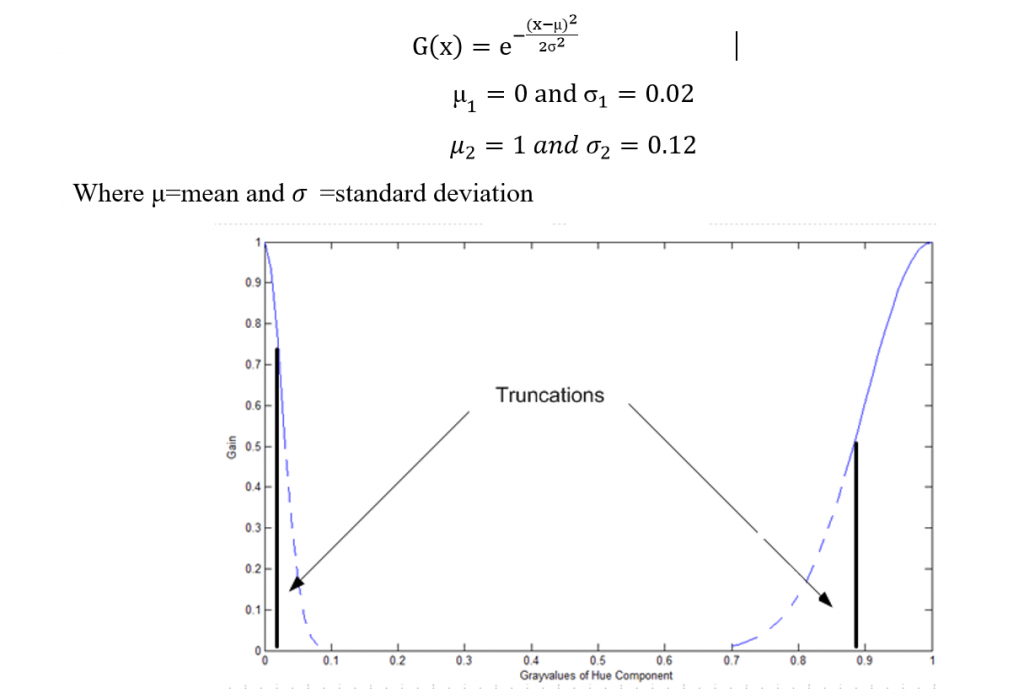
After converting the image to HSI, we need to filter the image further. For this we need to extract the border of the traffic sign which is generally red in Pakistan. To apply segmentation, a truncated Gaussian transformation function shown in Figure below, is applied to the Hue channel. This transformation results in red pixels taking larger gray values than the rest and thus highlighted, By considering only hue component to detect red color can be misleading since achromatic pixels may affect the process. To overcome the issue, we use an achromatic decomposition to ensure that R>G and R>B.
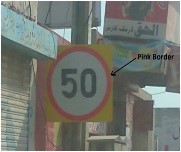
The transformation function contains two Gaussians, one for lower ( ) and the other for higher gray values ( ), where is the position of center peak and is standard deviation that controls the width of bell as shown in Equation. Values of standard deviation for the two are different and are decided on how the colors change with hue angle shown in above figure. It is clear that if we move counterclockwise from horizontal, the shades of red color diminish very early (almost at 10 degrees) while they last for almost 30 degrees if moved clockwise from the same axis, which includes a significant portion from the pink band too. In countries with bright sunshine like many areas in Pakistan, the border if not properly maintained turns pink as shown in Figure below The two Gaussian functions (one at and other at ) implement the following function:
Hole-Filling:
The image obtained after processed with the truncated Gaussian transformation function is grayscale image, with highlighted red regions; having all the red items, buildings and objects present in the background along with our sign. But by applying the morphological hole filling operation the highlighted background objects are discarded due to either not being hollow or not a closed object. We use geodesic reconstruction based hole-filling operation. This fills lower gray values regions surrounded by higher gray-values in an iterative way. First a marker image F (starting point for the transformation) is constructed to be zero everywhere except at borders of the image where it is assigned the maximum gray level where I is the binary image as shown in equation

Then, we use geodesic reconstruction of image F with the complement of the original image, R (which is called the mask here) repeatedly until two successive iterations produce the same result. The resultant image H, has all the lower gray valued regions filled with the average intensity of the surrounded higher gray valued regions, as shown in Figure below. The resultant hole filled image as shown in Figure below(b)obtained after applying iterative morphological operation on complement of grayscale image R with marker image F, which is followed by a subtraction operation which calculates difference of hole filled and original image. As a result we are left with only areas which were filled in previous process. And rest of non filled objects disappears. So as we obtain a simpler image to perform next operation
Also read here
Performance Analysis of Traffic Sign Detection and Recognition Techniques